銷售熱線:188 2384 2885
銷售熱線:188 2384 2885
外骨骼機器人|自由行走的未來
每年,全世界大約有250,000至500,000人遭受脊髓損傷。脊髓損傷 (SCI) 通常會導致下肢癱瘓(截癱)或全身癱瘓(四肢癱瘓),而脊髓損傷患者通常只能使用輪椅來輔助行動。
該團隊還參加了四年一屆的殘障人士人機體育競賽 — Cybathlon(也稱仿生學奧運會),以及一年一度規模較小的衍生賽事 —Cybathlon Experience(也稱仿生學奧運會體驗賽)。
外骨骼機器人的試用者必須通過嵌入在拐杖中的人機界面 (HMI) 預先選定每項任務所需的運動類型。這些運動方式由該團隊的運動工程師離線創建,并針對每個障礙物定制。必須精確控制關節角度,以確保試用者的穩定性和安全,這需要高品質旋轉編碼器的位置反饋。
2020年8月,該團隊推出了最新型“MARCH IVc”外骨骼機器人,該機器人在髖部和膝部使用旋轉關節,同時還在髖部和踝部使用四個直線關節(直線旋轉復合關節)。這種動力關節組合模仿人類的肌肉骨骼系統,并提供更大的自由度,可以實現更高級的步態。
Minderman先生繼續說道:“我們還在電機上安裝了另一個編碼器,由于電機的旋轉速度比關節快,因此這個編碼器可為我們提供更高的分辨率,從而有利于實現更佳的控制效果。電機編碼器主要用于控制回路,而關節編碼器則作為額外的安全措施。編碼器分辨率對于確保控制效果非常重要,之前,在根據位置計算速度時,我們遇到了一些問題。由于需要細分編碼器信號,因此位置測量誤差會被放大,這就是我們需要較高分辨率的原因。”
(來源:雷尼紹Renishaw)
Project MARCH是荷蘭代爾夫特理工大學 (Delft University of Technology)的一個非營利性多學科學生團隊,他們的目標是開發和制造能夠幫助SCI患者站立和行走的先進原型外骨骼機器人。

另外一個挑戰是,需要在電機附近進行測量,而這會產生電氣噪聲。外骨骼機器人中使用的電機會在電子元件附近產生強大的磁場,如果周圍有電線,則可能會產生信號噪聲。將數據從編碼器可靠地傳輸到CPU,而不丟失任何信息,這是一個挑戰。

嵌入式系統工程師Björn Minderman先生重點介紹了位置編碼器在該系統中的重要作用:“我們的外骨骼機器人有八個關節,其中兩個腳踝各一個關節,兩個膝蓋各一個,每側髖部各兩個。每個關節使用兩個編碼器。關節的電機旋轉,并通過減速裝置將電機的旋轉轉換為關節角度的變化。我們使用絕對式編碼器直接測量關節角度,因此一啟動就會知道關節位置,無需執行校準步驟。我們必須確保每個關節都處于正確的位置,并遵循我們的運動工程師設計的軌跡。”
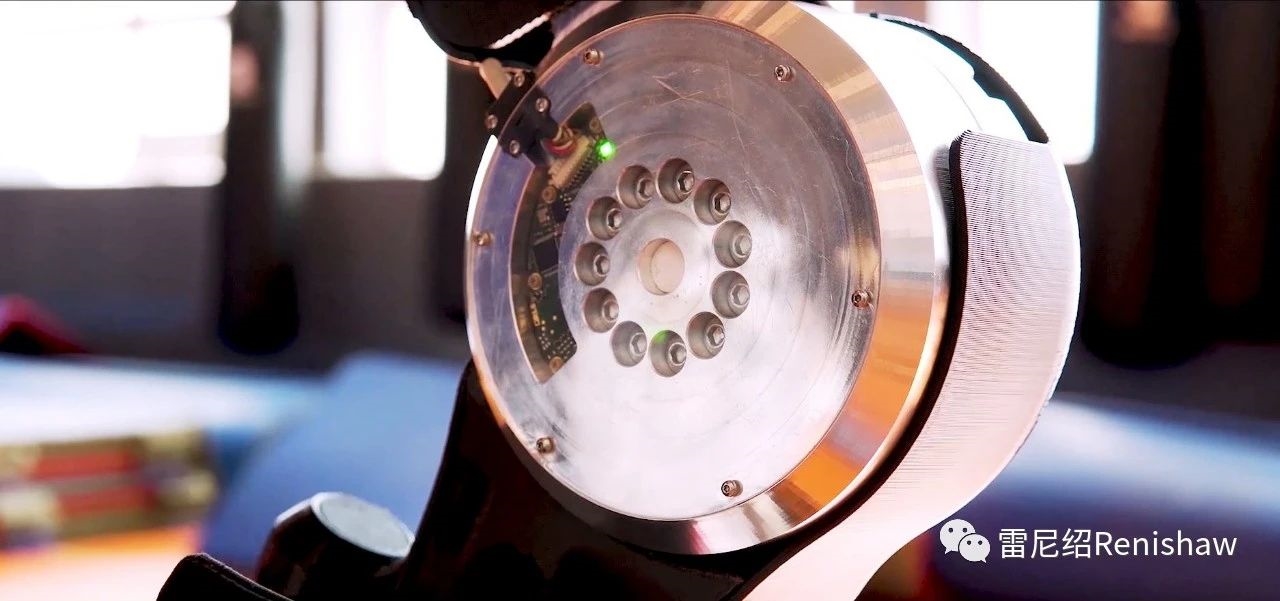
MARCH IVc外骨骼機器人集成了用于高分辨率(17位)旋轉關節反饋的新型RLS AksIM‑2絕對式編碼器,以及用于直線關節反饋的微型RLS RM08絕對式旋轉編碼器。
雷尼紹和RLS希望能夠支持未來的Project MARCH團隊在Cybathlon大賽中取得勝利。
隨著技術的發展,外骨骼機器人以及其他可穿戴機器人假肢有望徹底改變數百萬殘障人士的生活。